updating user manual
Showing
- Documentation/User Manual/1-user-interface/L_ElectricMotor.md 13 additions, 1 deletion...mentation/User Manual/1-user-interface/L_ElectricMotor.md
- Documentation/User Manual/1-user-interface/M_BatteryPackEditor.md 32 additions, 7 deletions...ation/User Manual/1-user-interface/M_BatteryPackEditor.md
- Documentation/User Manual/3-simulation-models/Electric_Motor.md 23 additions, 1 deletion...ntation/User Manual/3-simulation-models/Electric_Motor.md
- Documentation/User Manual/3-simulation-models/Electric_Storage.md 16 additions, 1 deletion...ation/User Manual/3-simulation-models/Electric_Storage.md
- Documentation/User Manual/pics/VECTO_Battery.png 0 additions, 0 deletionsDocumentation/User Manual/pics/VECTO_Battery.png
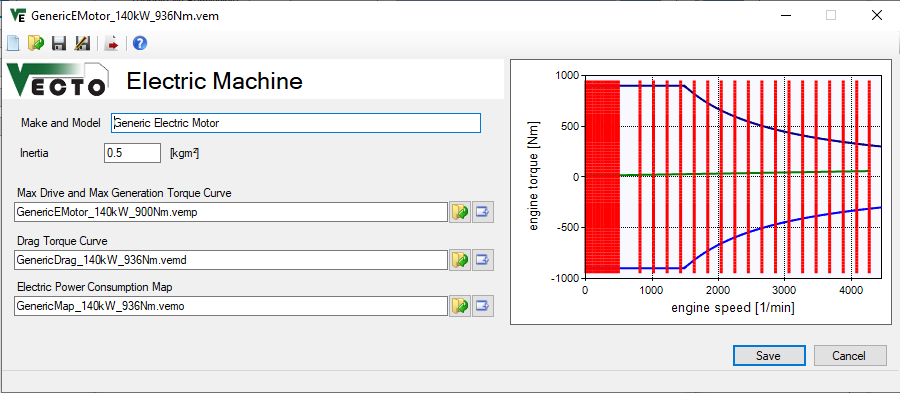
- Documentation/User Manual/pics/VECTO_ElectricMotor.png 0 additions, 0 deletionsDocumentation/User Manual/pics/VECTO_ElectricMotor.png
{kind=link}
{kind=link}

| W: | H:

| W: | H:
{kind=link}
{kind=link}
| W: | H:

| W: | H: